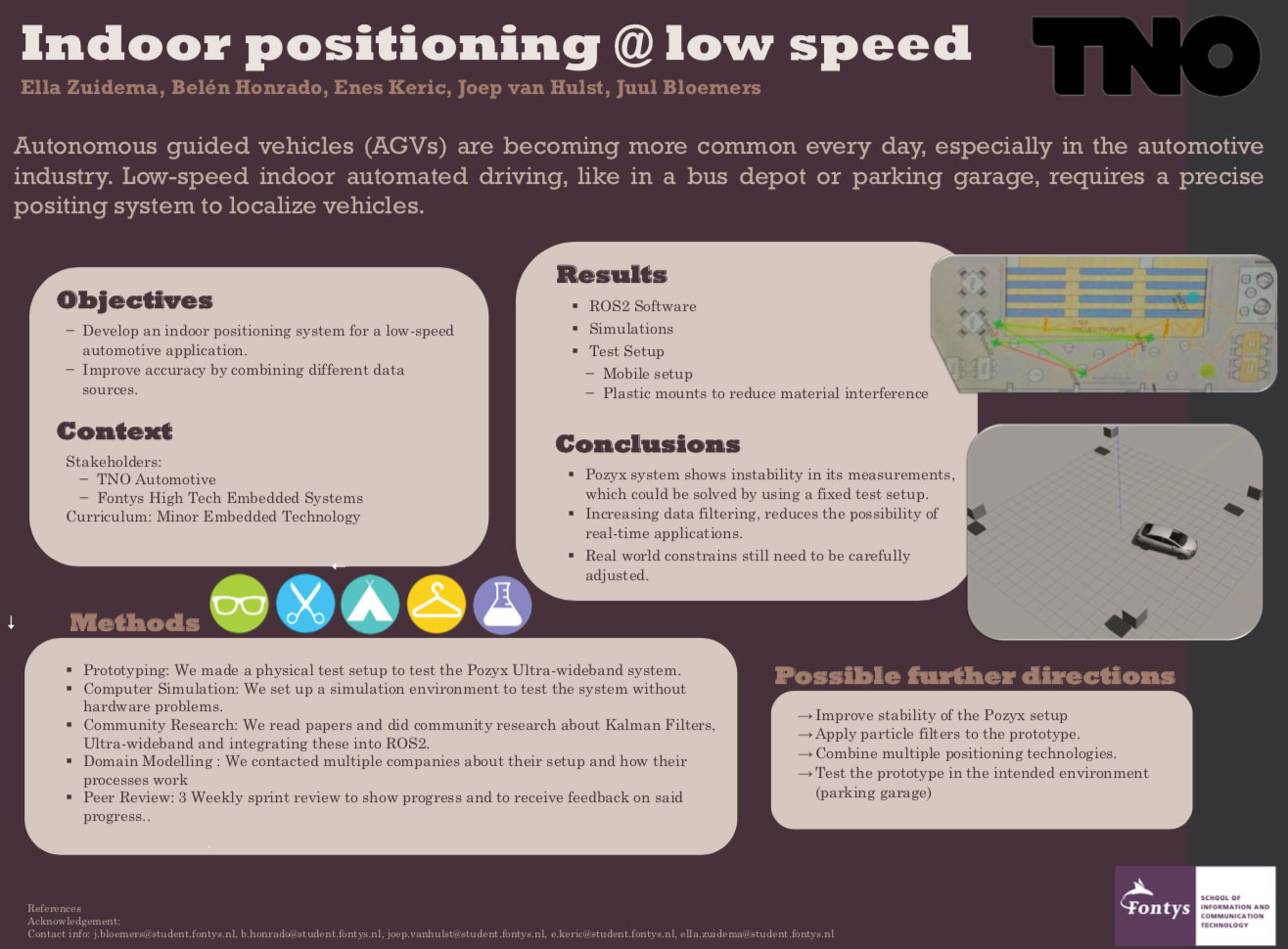
Develop a prototype indoor positioning system for low speed robot/automotive application, using UWB/Pozyx focusing on improving its accuracy by taking into account other data sources, like odometry and knowledge of the vehicle itself. The research questions that accompany this design challenge are:


{kind=link}
{kind=link}
{kind=link}