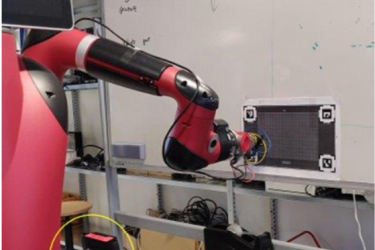
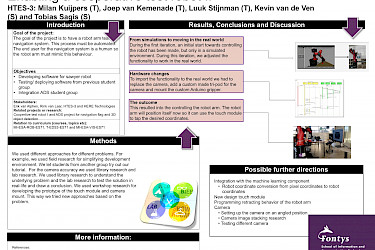
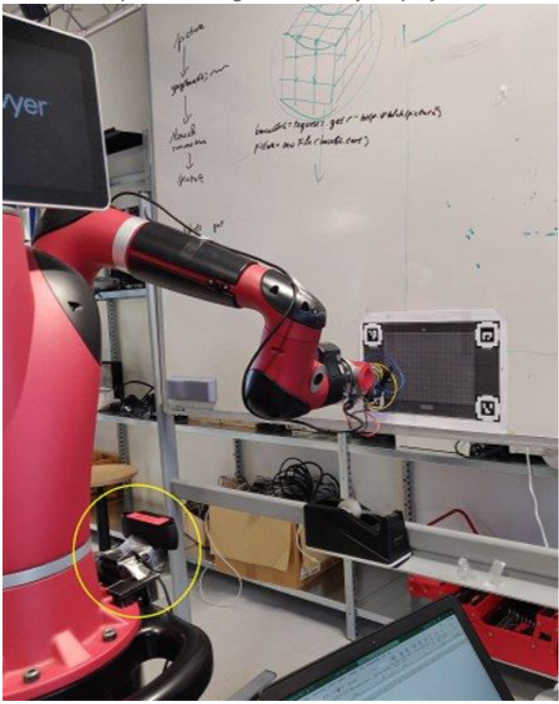
HERE Technologies develop and tests navigation systems, this project focuses on their touch screen-based navigation systems mainly used vehicles. Robot arms test the navigation systems on their functionality. These robot arms need to be configured manually to do these tests. Whenever a software update is applied the robots need to be reconfigured which introduces testing downtime.
The software development starts with deploying and testing software developed by the previous student group. Another project team has applied machine learning to enable testing more autonomously.
{kind=link}
{kind=link}