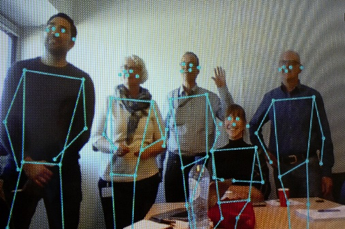
Demonstrator of how a robot could recognize specific human movements by using deep learning.
Keywords: deep learning, human intentions, proficiency, RAAK Close Encounters project, TEC for Society Smart Predictable Robots project.
In the near future robots and humans will coexist and cooperate more intensively in the same space. This requires that robots will understand humans much better than they currently do. Therefore the robots should recognize the human intentions and their poses. We have applied deep learning techniques to recognize human poses and derive features from camera images. This demonstrator combines insights from ICT, psychology, and robotics.